Introduction
Welcome
Robot Raconteur is a powerful communication framework for robotics and automation systems. While intended for use with robotics, it is flexible enough to be used for other applications, including building control, infrastructure, and Internet-of-Things applications, among many others. The Robot Raconteur ecosystem consists of several major segments:
The Robot Raconteur Framework Standards, which define the overall architecture, behavior, protocols, and data formats.
The official implementations of the Robot Raconteur framework, including Robot Raconteur Core, Robot Raconteur Web, and Robot Raconteur Lite.
Standard Service Definitions and Companion Libraries that support these standards.
Device Drivers, Utilities, User Interfaces, and Support Libraries.
Many of these components will utilize Standard Types and the Companion Libraries.
Related projects such as the PyRI Open-Source Teach Pendant.
The overall Robot Raconteur ecosystem is vast and can be somewhat overwhelming to a new user. This guide will help ease a new user into understanding and taking full advantage of the ecosystem.
Note
To help locate available components, refer to the Robot Raconteur Directory.
Note
This guide is intended to be an introduction and tutorial. See Robot Raconteur Documentation for a full list of available reference documentation.
Robot Raconteur has been used on numerous projects and received funding from the United States DoD Advanced Robotics in Manufacturing (ARM) Institute and New York State.
Presentations
Robot Raconteur an Interoperable Middleware: https://www.youtube.com/watch?v=3jhDXIRUiQY
ROS-Industrial 2022 presentation: https://www.youtube.com/watch?v=nxIUeRPE16k
ROS Hardware Interfaces Presentation: https://www.youtube.com/watch?v=NqwgbjatKJE
Papers
Examples
Microassembly: https://www.youtube.com/watch?v=2KrOI6GOogE
Human Guided Dual-Arm Manipulation: https://www.youtube.com/watch?v=OfFp_3kPHCk
Cooperative Robotics: https://www.youtube.com/watch?v=FQqaPFqu0Gk
Smart Conference Room: https://sites.ecse.rpi.edu/~rjradke/papers/afshari-buildsys15.pdf
Assistive Robotics: https://www.youtube.com/watch?v=5JM8bgZvMg0
PyRI Open-Source Teach Pendant: https://www.youtube.com/watch?v=9KSYgGpG8mk
Features
The Robot Raconteur framework is an advanced form of “Remote Procedure Call” (RPC) middleware specially designed for robotics and automation systems. This specialization is designed to improve interactions with robots in terms of organization and semantics of interacting with devices, discovery/connection management, data types, data communication latency, and reliability. Robot Raconteur is an “augmented-object oriented” RPC system. The “augmented” means that the objects have extra “member types” which support communication semantics required for robotics applications. This unique design allows for true plug-and-play operation of Robot Raconteur, and significantly greater ease-of-use compared to competing frameworks.
Note
Robot Raconteur has a unique “augmented object-oriented” design and is very different from ROS Middleware, which is a pub-sub system. Robot Raconteur can provide similar functionality to pub-sub systems using “Subscriptions”, but the focus is on the client-service model.
Robot Raconteur currently supports the following platforms:
Windows (>WinXP)
Linux
MacOS (>10)
Android
iOS
FreeBSD
WebAssembly (Robot Raconteur Core with Emscripten)
Web Browser (Robot Raconteur Web)
ASP.NET Server (Robot Raconteur Web)
Arduino (specialized demo)
Support is planned for VxWorks and QNX.
The following computer languages are supported:
C++
Python
MATLAB
C#
Java
LabView
ANSI C (under development)
JavaScript (under development)
Support is planned for Rust, Go, and Lua.
Note
Most applications will use the Robot Raconteur Core implementation. Supported languages for the core library are C++, Python, MATLAB, C#, Java, and LabView. The LabView implementation is a commercial add-on available from Wason Technology, LLC. See the Installation page for instructions of how to obtain the LabView add-on.
Robot Raconteur has these additional differentiating features:
Compatibility: 22 platforms/architectures, 7 languages, 6 transport technologies
Client-service model
“Augmented Object-Oriented” model
Forward and backwards compatibility using polymorphism
Plug and play capability
Request-Response, streaming, and “most recent”
TLS, certificates, and password security
Two central certificate authority chains, by Digicert and private HSM
Certificates available at nominal cost
Compatible with Web and Cloud using WebSockets
Node and service discovery
Long-Term compatibility
Open Source, Apache 2.0 License, first open source release Fall 2018
Open Standards: https://github.com/robotraconteur/robotraconteur_standards
Core library package “robotraconteur” available in ROS Noetic and ROS Humble
Robot Raconteur ↔ ROS 2 Bridge: https://github.com/robotraconteur-contrib/robotraconteur_ros2_bridge
Client-Service Object-Oriented Model
Robot Raconteur uses an object-oriented client-service model. “Nodes” communicate with each other by passing “messages” using “transports”. All communication between nodes is “packed” into messages, and an “augmented object-oriented” protocol is built on top of this message passing layer.
The figure below shows the basic architecture of a Robot Raconteur client and service. Services contain some resource that clients need to access. This resource may be something physical like a robot, or something virtual like a software application. The service consists of one or more “objects”. The objective of Robot Raconteur is to reflect these objects to the client, creating “object references”, sometimes referred to as “proxies”. Robot Raconteur is designed to make it appear to the user as if the object exists locally in the client as much as possible. Essentially, Robot Raconteur encapsulates the complex communication from the client user, so the user, for the most part, does not need to be concerned with the details of the communication.

Clients “connect” to the service using a known URL or use “discovery” to find the service on the network. Once connected, the user can communicate with the service using the object “members”. In a typical object-oriented language, these members would include “properties”, “functions”, and “events”. Robot Raconteur uses eight member types to better handle the types of communication required for robotics:
propertyfunctioneventobjrefpipecallbackwirememory
The use of these members will be discussed throughout the examples.
Request/response members support transparent try/catch exception handling, meaning that exceptions are transported automatically to the caller. This reduces the amount of boilerplate error-handling code required.
With Robot Raconteur, objects are always passed by “reference,” while data is passed by “value.” This means that the service always owns the objects, while data is copied and passed between nodes. The following data types are supported:
Numeric primitives including integers, floating points, and complex numbers
Arrays and multi-dim arrays
Strings
Structures
Pods
Named arrays
Containers (map, list)
See the Framework documentation for more information.
Plug-and-Play Interoperability
Robot Raconteur supports plug-and-play operation using two methods:
Dynamic type and proxy handling
Clients connecting to a service receive a “Service Definition” and can dynamically handle objects and value types.
Used for scripting languages like MATLAB and Python.
Interoperability through common or standardized “Service Definitions”
Clients are designed to connect to specific defined types. If the service implements the expected types, the client can interact with the service.
Standardized types are available for many common devices and systems.
Deployed systems will require standardized types for interoperability.
Dynamic typing for scripting is intended for laboratory and prototyping use.
Discovery and Subscriptions
Robot Raconteur uses “discovery” to find nodes. Nodes can be running on the same computer, within the same process (intraprocess), connected over a network, or connected using a peripheral connection such as USB. Discovery uses transport-specific communication protocols to detect and enumerate available services. For a normal Ethernet local area network, IPv6 multicast packets are used to detect nodes.
Note
IPv6 uses automatic 128-bit “link-local” addresses that do not require configuration. Robot Raconteur by default uses IPv6 addresses.
Discovery can be used to detect nodes and then create connections, or it can be combined with automatic connection management using “Subscriptions”. Subscriptions build on discovery and create robust connections to services based on connection criteria or based on a URL.
Standard Service Types
Standard service types are used to allow for interoperability between services. For example, robots will often
implement the standard com.robotraconteur.robotics.robot.Robot object type, defined in the
com.robotraconteur.robotics.robot service definition. Clients that are designed to understand the Robot
standard type will be able to interact with any service that implements this type.
Note
A separate repository is used to store the Standard Service Types, often referred to as “standard robdef”. The companion libraries Robot Raconteur Companion, Robot Raconteur Companion Python, and Robot Raconteur Companion .NET provide support code. They also contain the “thunk” code so no generation is needed.
Standard Drivers
Drivers for various devices such as robots and sensors are constantly under development. Most of these drivers take advantage of standard types to allow for interoperability. See the Directory for a full list of available drivers.
Industrial robots use a base class called “Abstract Robot” to implement drivers. This base class makes implementing robot drivers relatively easy. The diagram below shows the Robot Raconteur driver running on an embedded computer, connecting to the robot using a private network. The driver communicates with the robot using proprietary protocols and provides a standard interface to the system network.

Reynard the Robot
Reynard the Robot is a simple cartoon robot used to demonstrate the capabilities of Robot Raconteur. See the Meet Reynard the Robot page for more information.
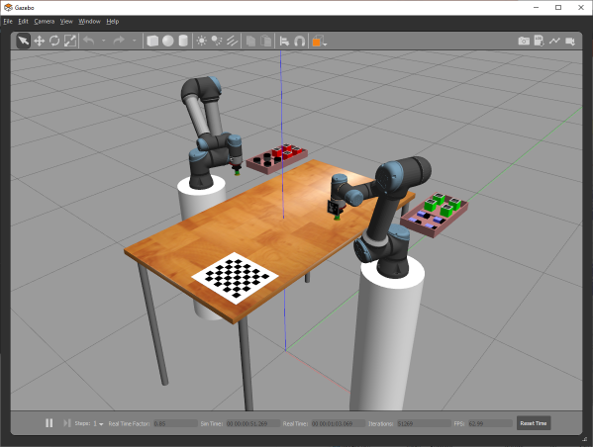
Training Simulator
A Training Simulator based on the Gazebo robot simulator has been developed to help learn Robot Raconteur and test new ideas in a safe environment. The simulator runs on Windows, Linux, and MacOS.
Three scenes are included in the simulator:
Universal Robot UR5e Scene
Two Universal Robots UR5e Robots
Two simulated vacuum grippers
An overhead simulated camera
Payloads
Calibration target
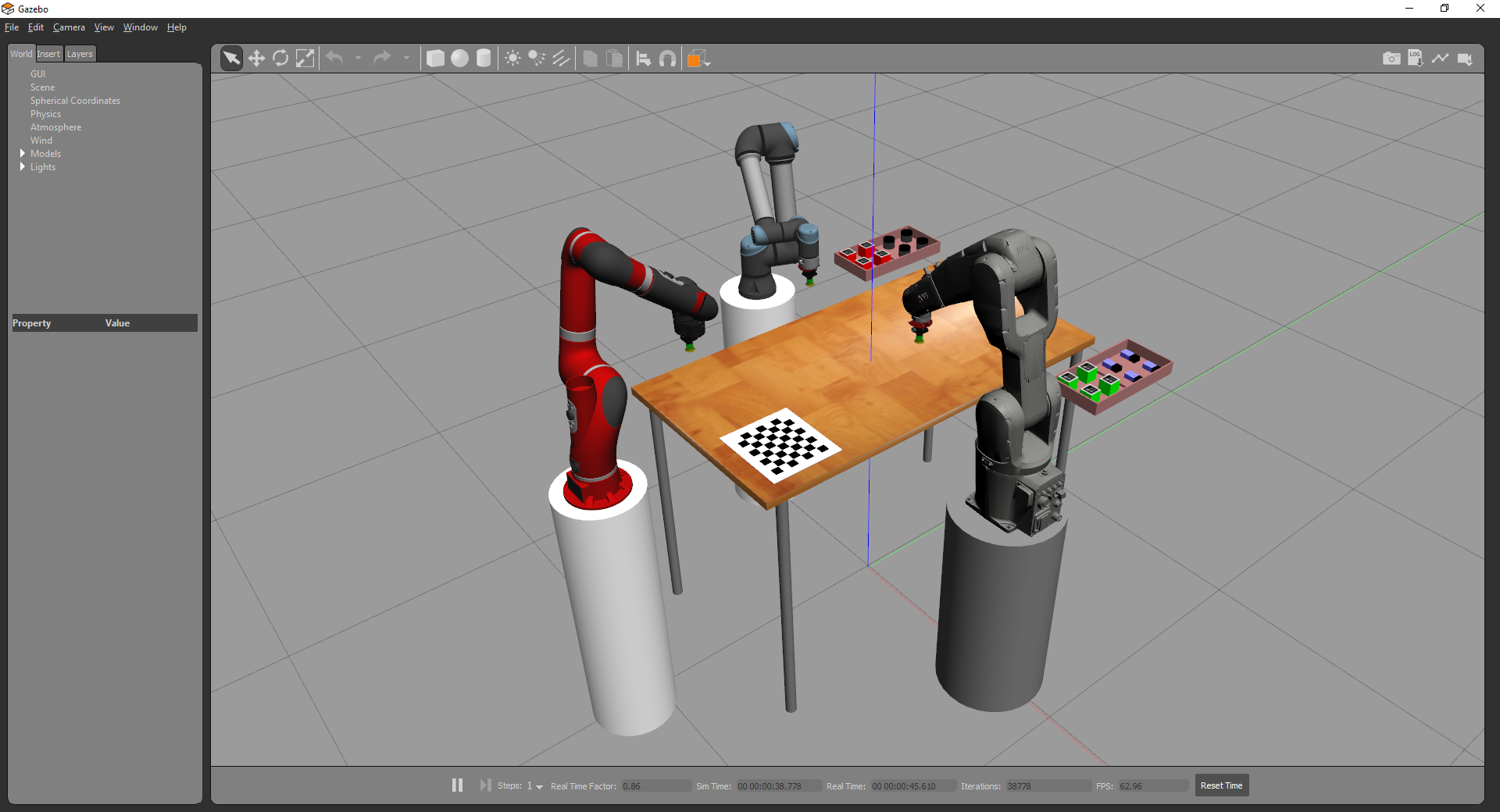
Multi Robot Scene
Universal Robots UR5e Robot
ABB IRB 1200-5/0.9 Robot
Rethink Robotics Sawyer Robot
Three simulated vacuum grippers
An overhead simulated camera
Payloads
Calibration target
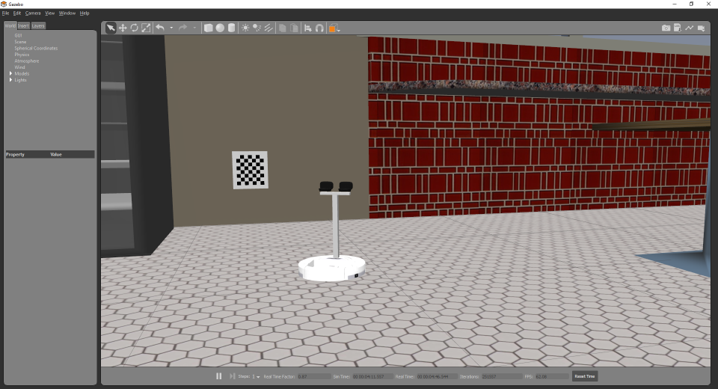
iRobot Create 1 Scene
iRobot Create
Stereo camera mounted on robot
“Cafe” scene from the Gazebo model library
The simulator uses the Robot Raconteur Gazebo Plugin, which allows for most of the API of Gazebo to be accessed using Robot Raconteur. Simulated device drivers interact with the plugin to simulate device behavior.
Examples
The rest of this Getting Started manual contains examples of using Robot Raconteur. This guide covers Python, MATLAB, and LabView examples. Select the appropriate tab for the language you are using by clicking on the tab name. Refer to the documentation for each specific library and computer language for detailed reference beyond what is offered in the examples, including the other supported computer languages.
Note
Leave a message on the Discussion board if you have a question!